
Ausgangssituation & Aufgabe
Für einen Zulieferer der Automobilbranche realisierte Schwingshandl ein automatisiertes Deckelhandling-System. Einzelne Deckel mussten aus einem Stapel entnommen und präzise auf Behälter aufgesetzt werden. Aufgrund der relativ großen Distanz zwischen Deckelstapel und Deckelposition waren hohe Dynamik, Genauigkeit und Prozesssicherheit gefordert. Gleichzeitig sollte der Behälternachschub mit hoher Leistung und exakter Positionierung erfolgen.
Realisierung
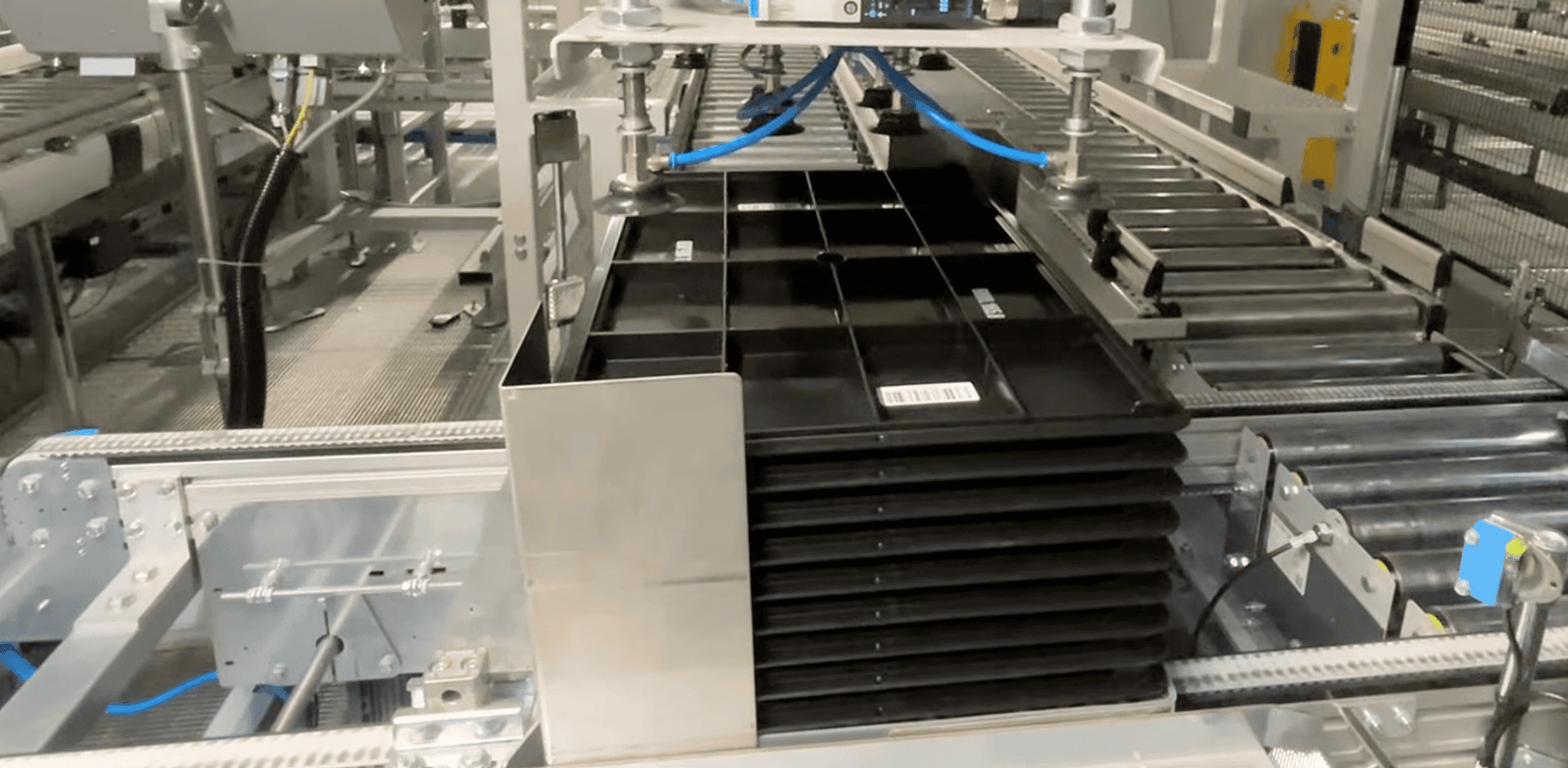
Schwingshandl entwickelte ein hochdynamisches Handlingkonzept auf Basis einer Portalachse mit pneumatischen Sauggreifern. Die Portalachse überbrückt die Distanz zwischen Deckelstapel und Behälter effizient und präzise.
Für den Behältertransport kommen Zahnriemenförderer mit integrierten Zentriervorrichtungen zum Einsatz, die eine exakte Positionierung für den Deckelaufsetzprozess gewährleisten.
Eingesetzte Komponenten
- Portalachse als Verschiebeachse mit Zahnriemen und stationärem Antrieb
- Elektromechanische Hubachse
- Pneumatische Greifvorrichtung mit Saugeinheit
- Fördertechnik auf Basis von Zahnriemenförderern
Mehrwert
- Präzises und prozesssicheres Aufsetzen einzelner Deckel
- Hohe Dynamik trotz großer Verfahrwege
- Exakte Positionierung der Behälter im Deckelprozess
- Zuverlässiger Betrieb bei hoher Leistung
Dieses Video vermittelt einen Einblick in einen Teil der Gesamtanlage und bildet nicht alle Bereiche und Funktionen im Detail ab.